平衡车的PID控制
PID控制一般由3个单元组成,分别是比例 (P)单元、积分(I) 单元、微分(D) 单位。
P:Proportion (比例),将输入偏差乘以一个常数
I: Integral(积分),对输入偏差进行积分运算
D: Derivative (微分),对输入偏差进行微分运
公式:
PID结果=P系数误差值+I系数误差的积分+D系数*误差的微分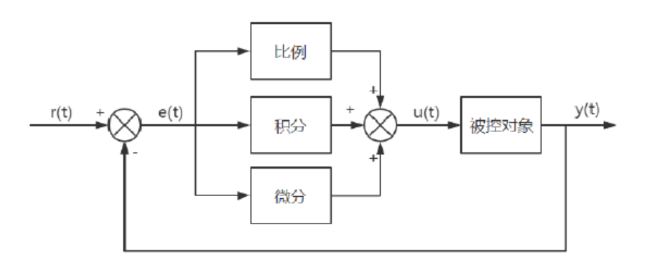
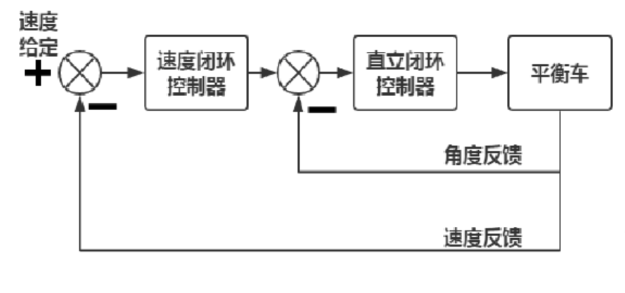
平衡车的运动过程不外乎保持平衡,前进、后退运动,左右转向运动,可划分为三个基本控制任务:
直立控制:控制自平衡车在竖直平面保持静止或动态平衡
速度控制:控制自平衡车前进后退的速度
转向控制:通过控制两轮差速来达到转向效果